
ابتكار روبوتات لا تحتاج لمكونات إلكترونية وتتحرك بضغط الهواء
تمكن باحثون بجامعة أكسفورد في بريطانيا من تطوير فئة جديدة من الروبوتات تعمل دون أي مكونات إلكترونية أو محركات أو أجهزة حاسوب، وتعتمد بالكامل على ضغط الهواء لتوليد الحركة.
وأوضحت الدراسة، التي نشرتها دورية Advanced Materials أن هذه الروبوتات، التي وصفت بأنها “روبوتات مائعة” قادرة على توليد حركات معقدة وإيقاعية، بل وتستطيع مزامنة حركتها تلقائياً دون تحكم مركزي.
والروبوتات اللينة فئة من الروبوتات الحديثة التي تصمم وتبنى باستخدام مواد مرنة بدلاً من الهياكل الصلبة التقليدية، بحيث تحاكي في حركتها وتفاعلها خصائص الكائنات الحية من حيث الليونة والقدرة على الانحناء والتشكل.
وتعد هذه الروبوتات ثورة في عالم الهندسة والذكاء الاصطناعي؛ لأنها تجمع بين الميكانيكا الحيوية والعلوم المادية، ما يجعلها قادرة على أداء مهام يعجز عنها الروبوت التقليدي المصنوع من المعادن والمحركات الصلبة.
وتصنع الروبوتات اللينة غالباً من مواد مثل السيليكون أو البوليمرات القابلة للتمدد، وتشغل بوسائل مختلفة، منها الهواء المضغوط أو السوائل أو المجالات المغناطيسية، بحيث تسمح لها بنيتها بالتفاعل الآمن مع الإنسان والبيئة من دون التسبب في أضرار. وتستخدم هذه الروبوتات في تطبيقات دقيقة وحساسة، مثل الجراحة الطبية أو المناولة الدقيقة في المصانع أو عمليات الاستكشاف في البيئات الخطرة، بفضل قدرتها على التكيف والدخول في الأماكن الضيقة.
ويكمن التحدي الأكبر في هذا المجال في كيفية جعل هذه الروبوتات تتخذ قراراتها، أو تنفذ سلوكيات معقدة دون الاعتماد الكامل على أنظمة إلكترونية صلبة.
قال الباحثون إن التجربة كشفت إمكانية توليد سلوكيات معقدة في آلات لا تمتلك عقلاً بالمعنى التقليدي، إذ يمكنها أداء وظائف متعددة من خلال أجزائها الطرفية دون الحاجة إلى مركز تحكم إلكتروني.
وأوضح المؤلف المشارك في الدراسة، أنطونيو فورتي، الباحث بقسم علوم الهندسة في جامعة أكسفورد، أن هذه الفكرة تمثل تحولاً جوهرياً في طريقة التفكير في بناء الروبوتات، إذ يمكن إسناد المهام الوظيفية إلى الأطراف الميكانيكية بدلاً من تحميل النظام المركزي كل العمليات.
وسعت الدراسة إلى معالجة أحد التحديات الكبرى في مجال الروبوتات اللينة، وهي كيفية دمج السلوك واتخاذ القرار داخل البنية الفيزيائية للروبوت نفسه، فالمعتاد في تصميم الروبوتات التقليدية أن تعتمد على نظم إلكترونية معقدة تشمل أجهزة استشعار ومعالجات وحواسيب للتحكم في الحركة واتخاذ القرار.
لكن الباحثين رأوا أن هذه الطريقة تحد من مرونة الروبوت وتبطئ استجابته للبيئة المحيطة، بخلاف الكائنات الطبيعية التي تتسم بسلوكيات لامركزية نابعة من التفاعل بين الجسم والبيئة.
واستوحى فريق البحث فكرة من الطبيعة، تتمثل في أن أجزاء الجسم المختلفة تلعب أدواراً متعددة ويمكن أن تظهر سلوكيات متزامنة دون مركز تحكم واحد، واعتمدوا على تطوير وحدة صغيرة معيارية يمكنها أداء مهام ميكانيكية اعتماداً على ضغط الهواء فقط، تماماً كما تستخدم الدوائر الإلكترونية التيار الكهربائي لأداء وظائفها.
ويمكن لهذه الوحدة أن تؤدي عدة أدوار من بينها التحرك أو التشوه استجابة لتغيرات الضغط لتعمل كـ”عضلة”، أو استشعار التغير في الضغط أو اللمس لتعمل كـ”حساس”، أو التحويل بين حالتي التشغيل والإيقاف لتعمل كصمام أو بوابة منطقية.
وصمم فريق البحث هذه الوحدات بحيث يمكن توصيلها ببعضها مثل تركيب قطع المكعبات، إذ يبلغ حجم كل وحدة عدة سنتيمترات فقط، ويمكن من خلال الجمع بين عدد منها تكوين روبوتات مختلفة دون الحاجة إلى تغيير التصميم الأساسي.
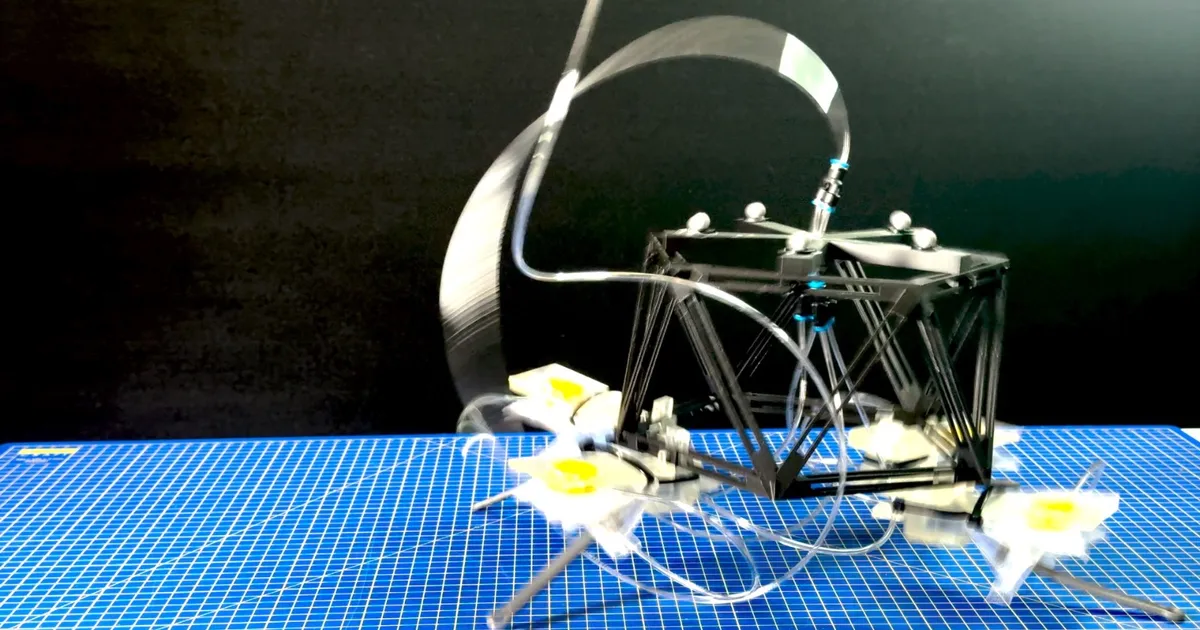
وفي التجارب المعملية، أنشأ الباحثون روبوتات صغيرة بحجم صندوق الأحذية تقريباً، قادرة على القفز أو الاهتزاز أو الزحف اعتماداً على طريقة ترتيب الوحدات.
وأظهرت إحدى التجارب أن الوحدة الواحدة يمكنها الجمع بين الأدوار الثلاثة السابقة في الوقت ذاته، ما يسمح لها بإنتاج حركة إيقاعية تلقائية بمجرد تطبيق ضغط هواء ثابت عليها، وعندما ربط الباحثون عدة وحدات من هذا النوع معاً، بدأت حركتها تتزامن بشكل طبيعي دون أي تدخل حاسوبي أو تعليمات برمجية.
واستخدمت هذه الخصائص في ابتكار روبوتين تجريبيين، أحدهما يعرف باسم “روبوت الهزاز”، القادر على فرز الخرز داخل أوعية مختلفة من خلال إمالة منصة دوارة ميكانيكيا، والآخر هو “الروبوت الزاحف” الذي استطاع استشعار حافة الطاولة والتوقف تلقائياً قبل السقوط، وتمكنت الروبوتات في الحالتين من تحقيق تنسيق حركي كامل من خلال النظام الميكانيكي فقط، دون وجود أي وحدة تحكم إلكترونية.
المؤلف الرئيسي للدراسة، مصطفى موسى، الباحث في قسم علوم الهندسة بجامعة أكسفورد، أوضح أن هذه القدرة على التنسيق التلقائي لا تحتاج إلى تعليمات مبرمجة مسبقاً، بل تنشأ تلقائياً من طبيعة الترابط الميكانيكي بين الوحدات وطريقة تفاعلها مع البيئة.
وقال إن هذه الظاهرة تمثل مثالاً حياً على كيف يمكن للأنظمة الفيزيائية البسيطة أن تظهر سلوكيات جماعية معقدة دون وجود مركز قيادة.
واستخدم الباحثون إطاراً رياضياً يعرف باسم نموذج “كوراموتو” لتفسير ظاهرة التزامن التي لاحظوها؛ ويستخدم هذا النموذج عادة لوصف كيفية تزامن الشبكات المكونة من “مذبذبات” أو أنظمة متذبذبة، مثل مصابيح اليراعات التي تومض في وقت واحد بعد فترة من المراقبة المتبادلة.
وكشف تطبيق هذا النموذج أن الحركات المتناسقة في الروبوتات تنشأ تلقائياً من التصميم الفيزيائي، حين تتصل أجزاؤها ميكانيكياً عبر البيئة المحيطة، إذ تؤثر حركة كل ساق في الأخرى عبر القوى الناتجة عن الاحتكاك والانضغاط والارتداد.
وأظهر التحليل أن هذه القوى تنشئ حلقة تغذية راجعة تجعل حركات الأرجل مترابطة بطريقة طبيعية، لتنتج حركة متناغمة دون أي إشارات كهربائية.
وأفادت الدراسة بأن هذه الروبوتات لا تزال في مرحلة تجريبية على نطاق صغير، لكنها تمتلك إمكانيات هائلة للتوسع في المستقبل، موضحة أن المبادئ التصميمية الخاصة بها لا تعتمد على الحجم، ما يعني إمكانية تطوير نسخ أكبر قادرة على العمل في بيئات صعبة مثل الكواكب أو أعماق البحار، حيث تكون الطاقة محدودة والظروف غير متوقعة.
وأكد موسى في تصريحات خاصة لـ”الشرق” أن النظام الذي طوره يتميز بكونه لا يعتمد على مقياس محدد، موضحاً أن الآلية الأساسية التي يعتمد عليها النظام يمكن تطبيقها في أي حجم، دون أن تتأثر الكفاءة.
وأشار إلى أن التعامل مع الأنظمة الميكروية يظل تحدياً، لأن خصائص السوائل تختلف عند التصغير، حيث تصبح اللزوجة عاملاً مهيمناً ربما يعيق الأداء، أو يتطلب تعديلات دقيقة في التصميم.
وأكد الباحثون أن هدفهم في المرحلة المقبلة هو دمج هذه المبادئ مع مواد متقدمة وخفيفة الوزن لتوسيع نطاق الاستخدام، لافتين إلى أن التصميم البسيط والمعياري لهذه الروبوتات يجعلها قابلة للإنتاج على نطاق واسع بتكلفة منخفضة نسبياً، معتبرين أن القدرة على توليد حركة مستمرة باستخدام ضغط ثابت من الهواء فقط تمثل إنجازاً علمياً مدهشاً في حد ذاتها، لأنها تعني أن مصدر طاقة بسيط يمكن أن يدير نظاماً معقداً دون برمجة أو تحكم مركزي.
نقلاً عن: الشرق