
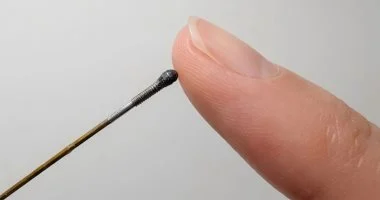
طوّر باحثون في الصين مستشعرًا بصريًا بحجم حبة أرز، يُمكنه تزويد الروبوتات الجراحية والأدوات الطبية بحاسة اللمس، حيث يقيس الجهاز القوة والضغط والالتواء في جميع الاتجاهات باستخدام الضوء بدلًا من الإلكترونيات، ويبلغ حجم المستشعر 1.7 مليمتر فقط. ويقول الباحثون إنه يُمكن أن يُساعد الروبوتات على اكتشاف أي تلامس غير آمن أثناء العمليات الجراحية الدقيقة والاستجابة الفورية. كما أثبت الفريق قدرة الجهاز على تحديد التراكيب المخفية تحت المواد اللينة، بما في ذلك الأجسام الشبيهة بالأورام المُدمجة في نماذج الأنسجة، حيث جاء هذا العمل من باحثين في جامعة شنغهاي جياو تونغ.
الضوء يحل محل الإلكترونيات
تعتمد أنظمة الجراحة الروبوتية الحالية بشكل كبير على التصوير. ومع ذلك، فإنها تُعاني من صعوبة استشعار التفاعل المادي في المساحات الجراحية الضيقة، كما أن مستشعرات القوة الحالية لا تزال كبيرة جدًا بالنسبة للعديد من الأدوات المصغرة، وقال جيانلونغ يانغ، قائد فريق البحث من جامعة شنغهاي جياو تونغ في الصين: “على الرغم من قدرة أنظمة التصوير الحديثة على إظهار الهياكل بوضوح، إلا أنها لا توفر معلومات حول التفاعل الفيزيائي، مثل القوة أو عزم الدوران، وغالبًا ما تكون مستشعرات القوة الحالية ضخمة أو معقدة للغاية بحيث لا يمكن تركيبها في الأدوات المصغرة”.
وأضاف: “بفضل تمكين الآلات من قياس قوة التلامس والضغط والقص والالتواء، يمكن لتقنيتنا أن تُمكّن الروبوتات من اكتشاف التلامس غير الآمن مبكرًا وتعديل حركاتها في الوقت الفعلي، لا سيما في البيئات الصغيرة والحساسة”، وقد صمّم الباحثون المستشعر حول ليف بصري ذي طرف مطاطي مرن، عندما يلامس الطرف جسمًا ما، فإنه يتشوه قليلًا. هذه الحركة الطفيفة تُغير طريقة انتشار الضوء داخل المستشعر، ثم تنقل حزمة ألياف متماسكة نمط الضوء إلى كاميرا. يحلل النظام الصورة الملتقطة باستخدام أساليب تعتمد على البيانات لحساب القوة وعزم الدوران في جميع الاتجاهات، وأوضح الباحثون أن هذا التصميم يتجنب تعقيدات التوصيلات الكهربائية الموجودة في المستشعرات المصغرة التقليدية.
قال يانغ: “يعمل مستشعرنا بطريقة مختلفة عن مستشعرات القوة المصغرة التقليدية، مثل أنظمة ألياف براغ (FBG) التي تعتمد على عناصر استشعار متعددة وهياكل مصممة بعناية لفصل مكونات القوة المختلفة”، وأضاف: “نحن لا نقيس القوة جزءًا جزءًا، بل نستشعر حالة التلامس الكلية في خطوة واحدة. ونعتقد أن هذا التحول سيسهل بناء أدوات صغيرة الحجم قادرة على الرؤية والشعور معًا”.
الكشف عن البنى المخفية
اختبر الفريق الجهاز في ظل ظروف تحميل مضبوطة باستخدام قوى معروفة وحركات التواء. وقدّم المستشعر قياسات قابلة للتكرار مع تخلف منخفض، ما يعني أن القراءات ظلت ثابتة أثناء دورات التحميل والتفريغ، كما اختبر الباحثون الجهاز في نماذج جيلاتينية تحتوي على أجسام كروية صلبة مصممة لمحاكاة الأورام المخفية تحت الأنسجة، ونجح المستشعر في الكشف عن البنى المدمجة وتحديد موقعها، ويعتقد الفريق أن هذه التقنية قد تُحسّن التوجيه اللمسي في الجراحة طفيفة التوغل. فغالبًا ما يعمل الجراحون الذين يستخدمون الأنظمة الروبوتية عبر مسارات ضيقة حيث يمكن أن يؤدي التلامس العرضي إلى إتلاف الأنسجة الحساسة.
قال يانغ: “تعمل الأنظمة الروبوتية المستخدمة في الجراحة طفيفة التوغل في مساحات ضيقة للغاية، مثل داخل العين أو عبر مسارات جراحية دقيقة. ومن خلال جعل الأدوات والروبوتات أكثر أمانًا ودقة، يمكن لهذه التقنية أن تجعل الإجراءات الطبية الدقيقة أكثر تحكمًا وتقلل من خطر التلف العرضي.”
المسار نحو الاستخدام العملي
يخطط الباحثون الآن لتحسين اتساق التصنيع وتقليل متطلبات المعايرة قبل طرح المنتج تجاريًا. كما يهدفون إلى دمج المستشعر في الأنظمة الروبوتية الطبية والصناعية لإجراء اختبارات طويلة الأمد في ظروف تشغيل حقيقية، وأوضح الفريق أن العمل الإضافي سيركز على تغليف التقنية في أنظمة صغيرة الحجم يمكن للأطباء والمهندسين استخدامها بسهولة في البيئات العملية.
تعليقات